
MONGOLIAN CHESS
Mongolian chess exists in 2 variants – big one and little one. Mongolian names for them are as following: the little one – shatar, the big one – hiashatar. Shatar is rather well-known game, but hiashatar is nearly absolutely unknown. However just this last variant is rather extraordinary and therefore it is more interesting.
The word “shatar” derivates from name of Arabian chess “shatranj”. It is quite natural, because the chess game came to Mongolia from Arabia through Iran (the most probable version). The main aim of the section “Mongolian chess” is to attract attention to hiashatar. Nevertheless description of shatar is placed first, because it is reasonable to explain material according to the principle “from simple to complex”. Besides information about shatar is much more numerous than about hiashatar.
Before description of the both games rules I would like to note the Mongols respect chess very much. They play chess, as a rule, in peaceful and deferential atmosphere. During the game the chess players sometimes forget all but nevertheless they continue to control their emotions, and game practically never turns into quarrel. In may be said that Mongols as polite and noble during chess game as Japanese. It is considered as improper behavior to boast of victory or openly to be glad.
In State Central Museum of Mongolia in Ulan Bator there is even a special exposition showing Mongolian chess. Two legends below show us how important is chess game for Mongols.
The Chess Player
Once, there was a Mongolian boy called Tohan, who was sent away to learn to read, write, play chess and the flute. His friend, Benppo did not see any value in studying. When Tohan returned home, bandits captured his camp. He soothed them with music from his flute and they eventually released him. He rode to a small town where he used his writing skill to help more food for the villagers. His journey also took him to the kingdom of Sakhim where the king killed subject who lost to him in chess. Benppo was the king’s next opponent! He lost and was about to be killed. But Tohan challenged the king to another game on condition that if he won, the death sentence in Sakhim would be done away with. Tohan won! His learning was indeed put to good use.
According to the popular Mongolian belief passionate chess players have a very long life. The second legend tells about it.
Khan and God of death
A certain Mongolian khan had to die in that moment when he was playing chess. Erlik, the God of death, sent to him a special envoy. But the envoy himself was an inveterate chess player. When he saw the skilful game he forgot his mission. So destined moment of death ran out and the khan lived and played chess still many years.
Since Mongols appreciate chess game very high, the chess players have in a yurta (movable dismountable round house of Mongolian nomads) honorable places, they aren’t obliged to stand up when persons, having higher position in society, come in. Chessboards are often carved on covers of boxes containing family souvenirs or jewelry, but also on more usual things, for example kitchen boards for cutting meat. Practically every family has shatar set, and even in the most poor yurta it is possible to find a little bag with old darkened chess pieces and a cracked, shabby chessboard, or at least a worn sheet of paper instead of board. At present shatar’s popularity decreased because of dissemination in Mongolia European (international) chess.
For creation of this section I used both Internet sites and “paper” literature. The information sources are shown below.
Internet sites
Literature
6. Б.Б. Цыденов, Л.А. Гармаева, Н.Б. Галданов. Шахматы в Бурятии. Улан-Удэ, 1976.
The material [2] was kindly given by Mr. D.B. Pritchard, the author of the well-known "The Encyclopedia of Chess Variants”. The data about hiashatar were found only in a single source – the book of Mr. N. Okano [3]. All pictures in this section were taken therefrom.
In the past Mongols did not have chess literature, the first book about a national chess - "Mongol shatar" – was published only in 1936, the author Sanzhazhamts.
It is necessary to note, that shatar is known not only at Mongols, but also at Buryats - nation, living in south Siberia and clossely related to Mongols.
Shatar
The board’s size is 8х8, all fields have the same color (light), the nomenclature of figures - as in a usual chess, and however their names and the shapes differ. There are various rules of the game of shatar, and participants usually specify the rules before the beginning of game. Let's start from the most common variant. Initial arrangement of pieces is the same as in international (European) chess. But the first move must be done only with queen pawns and only on 2 fields ahead, i.e. d2-d4 and d7-d5, so we may consider the position appeared as initial arrangement. The differences between rules of shatar and international chess are given below.
There is no castling in shatar; the queen moves on files and ranks as rook, and diagonally only to the neighbor square (i.e. as promoted rook in shogi – Japanese chess); the pawn moves always only on one square ahead (excluding obligatory first move by queen pawn) and promoted only to queen; the knight cannot checkmate. Sometimes they say that it is no en passant in shatar, but it is unnecessary, because en passant in shatar is impossible.
There are different kinds of check in shatar according to checking pieces: shak – by queen, rook or knight, touk (tuk) – by bishop, tsod (zod) – by pawn. Checkmate can be made only by shak (i.e. by queen or rook) or by continuous sequence of checks including at least one shak, last check must not be a check by knight. For example the sequence of checks by knight, pawn and bishop (the last check is checkmate) is win. But checkmating only by bishop(s) and/or pawn(s) means a draw – niol. If one players lost all pieces except king it is also a draw, but with other name – robado. As for stalemate - chzhit, there are two contradictory statements: 1) stalemate is draw; 2) to be stalemated means loss.
Sometimes one can run into following differences from the rules described above: checkmate by knight is possible, but it is not nice; game can be begun by king pawns too (in this case they move 2 square ahead, and all other pawns, including queen ones, move always 1 square ahead); queen stands to the right from king, as a result both kings stand not on the same file, but each king stands on that file, where opponent’s queen stand (see fig. 1), with such initial position pawns always move only 1 square ahead; bishop moves diagonally on 1-3 square.
Mongols have following names for their chess pieces:
King – noyon (prince, duke).
Queen – bers (fantastic animal resembling a big dog).
Knight – mori (horse).
Rook – tereg (chariot, vehicle).
Bishop – teme (camel).
Pawn – fu (child, young).
The pieces have, as a rule, following aspects: king - very important person, sitting on throne or in palanquin (he is a big feudal lord or even khan), knight - horse, bishop – camel (but sometimes elephant), rook – two-wheel cart, queen and pawn have the same shape, but different sizes – queen is a big dog, and pawn is a puppy or a little dog. So Mongolian pawn is a little queen. This reminds us that each pawn has a chance to become queen.
Usually shapes of white and black (green and red) pieces are identical. Often only pedestals of the pieces are painted.
Pieces of Mongolian chess can have other aspects too. Below some variants of them are described. Firstly, modernized forms exist (see description of king and rook below). Secondly, identical pieces have sometimes different shapes. Let’s begin with the kings.
The white king resembles the variant described above – it is a figure of venerable, stout and very honorable man with a beard, a partisan of old times and conservatism. The black king is an absolute antipode – it is a figure of thin and beardless young man, personifying new times and progress. In some modern chess sets black king was made even as a chairman of kolkhoz (socialist collective farm)!
As it was said before, big dogs usually represent queens. However there are also other candidates for queens – big cats. For white pieces it may be a figure of white lion with green mane, for black pieces – a figure of snow leopard.
Horses (knights) and camels (bishops) can have sexual distinctions: on one flank stallions and male camels stand, on other flank – mares and female camels.
Rook can be represented not only by chariot, but also by wheel, dragon, fairy bird garuda, peacock’s train, fan, and in modern chess sets – by car or tank. Pawns can be made not only as little dogs (puppies), but also as lion or tiger cubs, hares and birds.
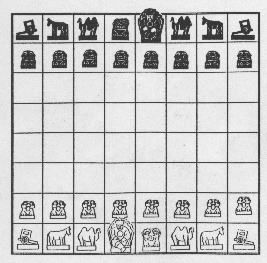
Fig. 1. Variant of initial arrangement of pieces in shatar
Here below is an example of possible ends of a shatar game. Whites: K b6, R b4, B d3, N g8, с6, h2; blacks: K с8, h3. It is usual to declare check and checkmate by loud voice, so exclamation marks are written after corresponding words.
Variant №1. 1.B f5 tuk! K b8 2.с7 zod! K а8 3.B е4 tuk! Result is a draw – niol, because not a single shak was declared.
Variant №2. 1.B b1 K b8 2.N е7 K а8 3.B е4 K b8 4.с7 zod! Result is a draw, as in the variant №1 above, and by the same reason.
Variant №3. 1.N е7 shak! K b8 2.с7 zod! Кр а8 3.С е4 checkmate! Whites won, because in the series of checks a shak was too.
Variant №4. 1.B f5 tuk! K b8 2.B f4! K a8 3.R a4 checkmate! Whites won by the same reason, as in the variant №3 (rook made a shak).
Variant №5. 1.R а4 K b8 2.B f5 chzhit! Here result depends on agreement, accepted about stalemate, i.e. in this variant either whites won, or a draw.
The black pawn on h3 may seem to be unnecessary, but it isn’t true: a single king cannot be checkmated, and without this pawn it were robado – a draw.
Now let’s consider an old problem having historical interest. Whites: K а1, R h1, R h3, B h2, f6, g6; blacks: K g8, Q с2, с3, d3. A following legend is connected with this problem. Two elderly Mongols played chess for high money stake. Wife of the one playing whites saw that her husband is in a critical situation and said him: “Two our children already grew up, let’s break our chariots, mount the children a camel and save us from tszut” (the tszut is a loss of cattle for reason of fodder shortage). The husband understood secret prompt and won in following way: 1.R h8+ K:h8 2.B е5+ K g8 3.R h8+ K:h8 4. f 7х.
Historical value of this problem is based upon the following: it is Mongolian variant of Dilaram’s checkmate – a famous problem of shatranj. It is astonishing that Mongols could keep both the problem and the legend during 600-700, and maybe even 1000 years, without chess notation and literature.
Hiashatar
Let's pass now to the basic purpose of the given section - to hiashatar. The game goes on a board 10х10. In hiashatar each player has 4 additional pieces: two pawns and two new figures named on hia, that is translated from Mongolian as the bodyguard, aide-de-camp, the page. We shall name them only bodyguards. Usually the bodyguard is represented as severe, even furious sitting man of middle age. The initial arrangement is shown on the fig. 2 on which it is easy to find the bodyguards: they are two identical men in peaked caps. Recently, under influence of the international chess, the pieces are arranged sometimes a little bit in another way: position of blacks does not vary, but white king and queen interchange their positions.
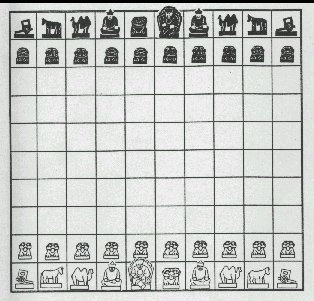
Fig. 2. Variant of initial arrangement of pieces in hiashatar
Let's pass now to the description of moves of hiashatar’s pieces. King, rook and bishop have the same moves as in shatar. But moves of pawn and queen have following differences from shatar: the queen moves as in the international chess, i.e. it combines moves of rook and bishop; pawn can go from initial position on 1-3 fields forward, the rule of a capture en passant exists, there is no obligatory first move. In hiashatar there are absent restrictions for checkmating, characteristic for shatar (an interdiction of checkmate by knight etc.). Castling is absent as well.
Now let’s pass to the most exotic piece – the bodyguard. On the one hand, it is an intermediate piece between king and a queen - it moves in any direction, as king and queen do, but only on 1-2 fields. But besides that it has a unique property - it brakes (delays) around itself any pieces. On all eight fields adjoining to it a zone of influence exists, inside which all pieces can move only on one step, i.e. on the next field. We shall explain it with the help of fig. 3. White and black rooks on d1 and d10 cannot beat at once each other - it takes minimum 7 moves. The white bishop on с5 does not check the king on f8, because its impact breaks on the field е7. It isn’t clear, how knight moves in the zone of influence. Probably, in such a zone it becomes simply motionless, or the zone doesn’t affect on it. Since the bodyguard easily can take every peace which has got in the zone of its influence, it nearly as mighty as queen, despite of its lesser range. On the other hand, in order to capture the bodyguard the piece must be in its zone of influence, therefore the capture of the bodyguard is, apparently, the extremely rare event. If the bodyguard attacks the king, the king cannot be taken by the bodyguard. Therefore if each player has only king and bodyguard(s) it is a draw.

Fig. 3. Zones of influences (shaded)
The hiashatar appeared about 500 years ago. The legend tells us about it in following way.
Long long ago a khan was living. He was forced to fight many wars. It helped him to understand that even most intensive training is not enough for a victory. Therefore he included into his army the authorized representatives responsible for safety. Other rulers found this innovation to be helpful too, and they made the same. And once a certain wise man under influence of these innovations has transformed the game of shatar, having entered into it particular bodyguards - the new figures responsible for safety of king.
Now even in Mongolia only few people show interest to hiashatar. However this original but poorly investigated game is undoubtedly worthy of attention.